Features
Video
Compent
Specs
| Machinery | |||
| Packaging Dimensions | W500×D500×H500mm | Packaging weight | 16kg |
| Robot Dimensions | W350×D240×H430mm | Robot weight | 14kg |
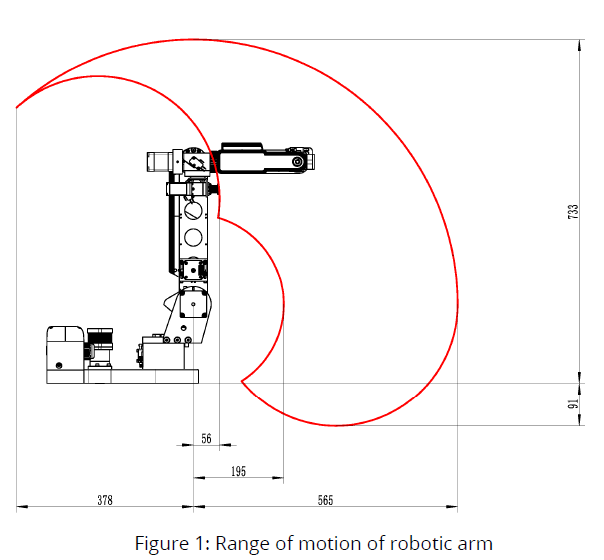
| Front Extension Arm Spread | 629mm | End Load | 2kg |
| Global Accuracy | 1mm | Repeatability | 2mm |
| Power | 198W | ||
| Electronic | |||
| Control Card | Teensy4.1Control of robotic arm movement | Auxiliary control | Arduino Nano8-channel relay control peripheral |
| Driver Power Supply | 220V Input 19.6~25.2V Output | Drive motors | Closed Loop Stepper Motor 5rpm |
| Software | |||
| Control | AR4(Windows) | Third Party | ROS(Ubuntu) |
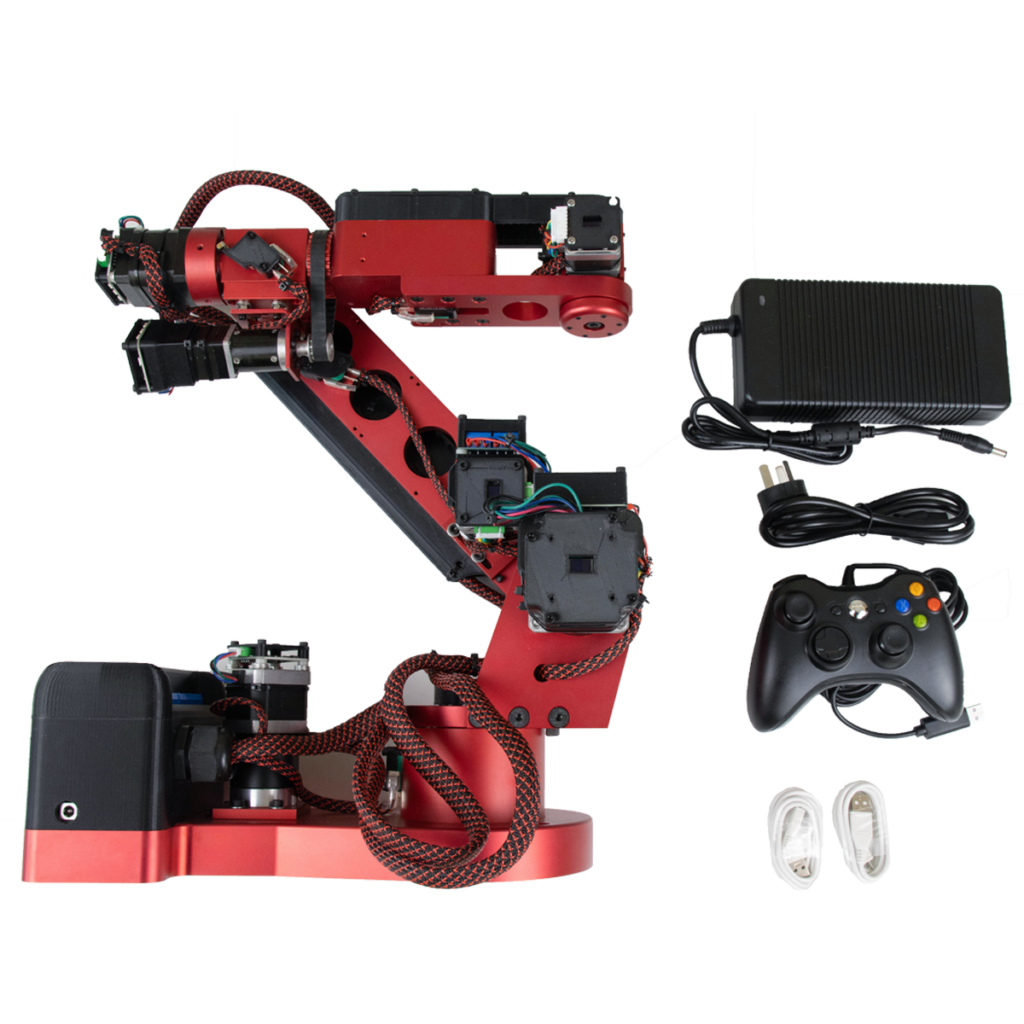
Shiping List
| No. | Name | Description | Quantity |
| 1 | Robotic Arm Body | / | 1 PCS |
| 2 | Six-axis control system | / | 1 PCS |
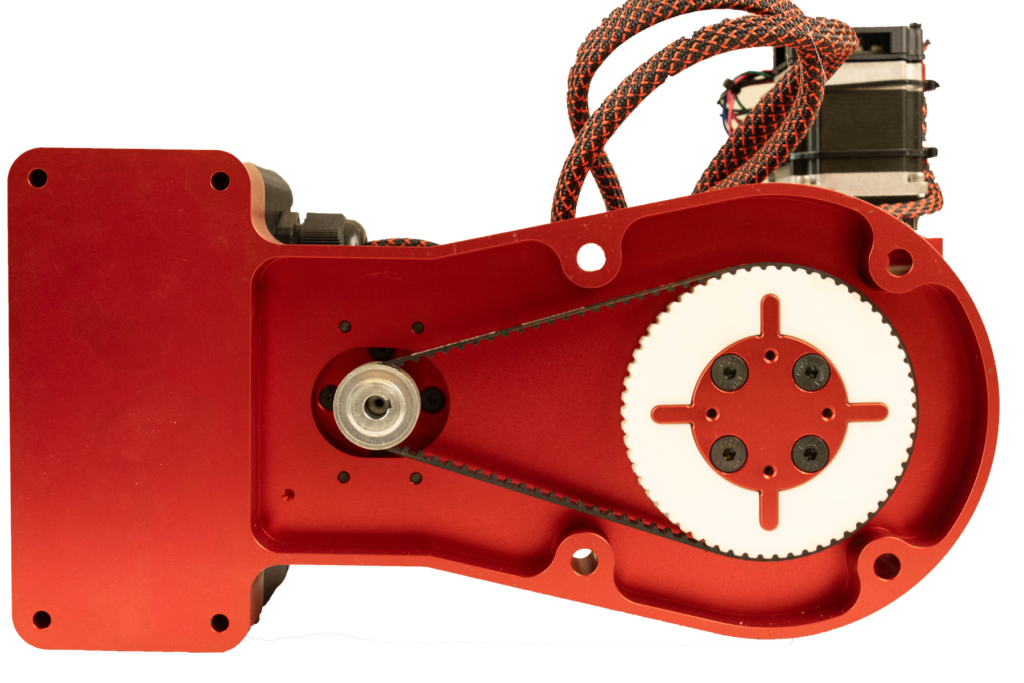
| 3 | Motor Drive System | / | 1 PCS |
| 4 | MicoUSB communication cable | 1 meter | 2 PCS |
| 5 | Power adapter | 24V 10A DC Power Supply | 1 PCS |
| 6 | Remote control teach pendant | XBOX Gamepad | 1 PCS |
| 7 | Interface application software (with source code) | / | 1 PCS |
| 8 | AR4 Embedded System Program Source Code | teensy4.1+Arduino Nano source code | 1 PCS |
| 9 | ROS Control Program Source Code | Control, simulation, etc. | 1 PCS |
| 10 | Robotic arm operation tutorial | Operation manual + operation video | 1 PCS |
| 11 | Parameter description of robotic arm | Product fixing holes, actuator flange, installation drawings, etc | 1 PCS |
| 12 | Control command description | / | 1 PCS |
| 13 | Simplified Solid Model | / | 1 PCS |
Deatail

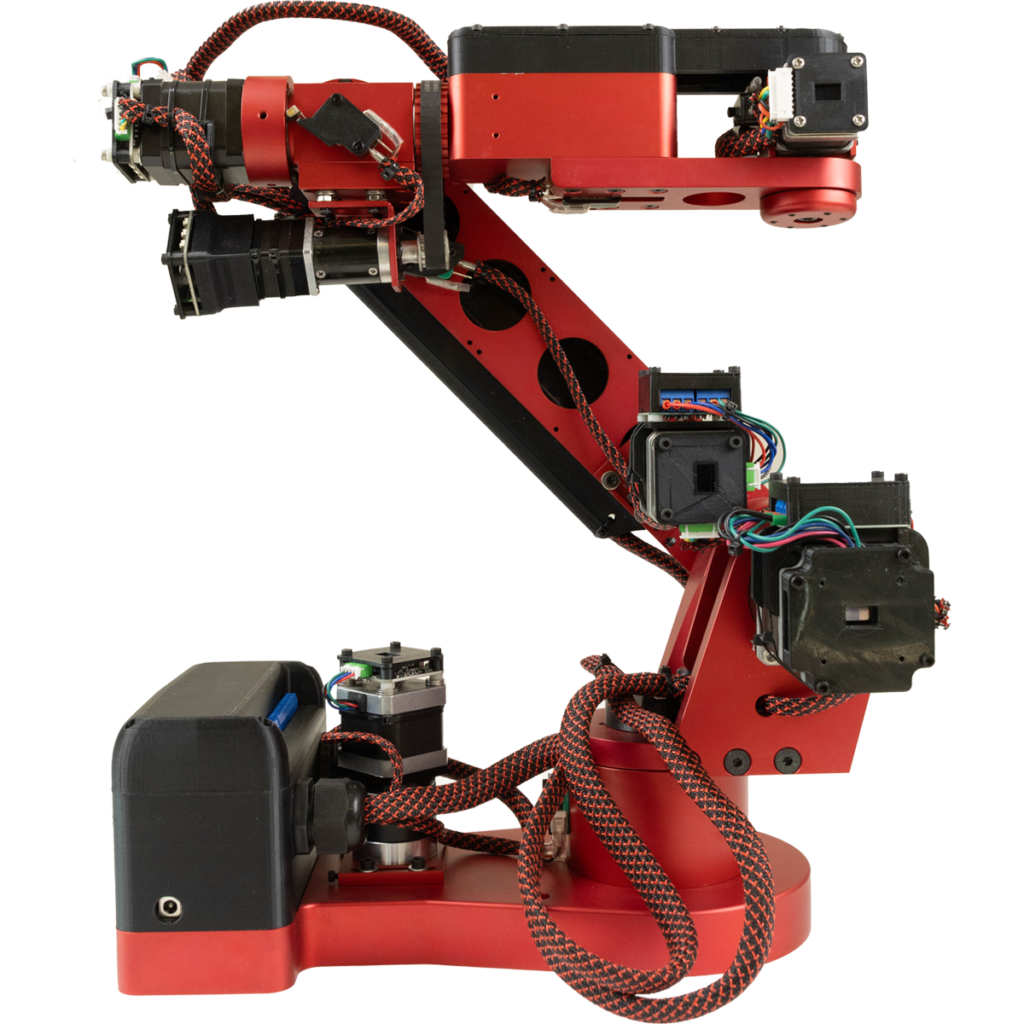
Structure
Electrical Composition
The electrical system of the robot arm consists of a power conversion and controller, a FOC motor driver, a high-precision magnetic encoder, and connecting cables;
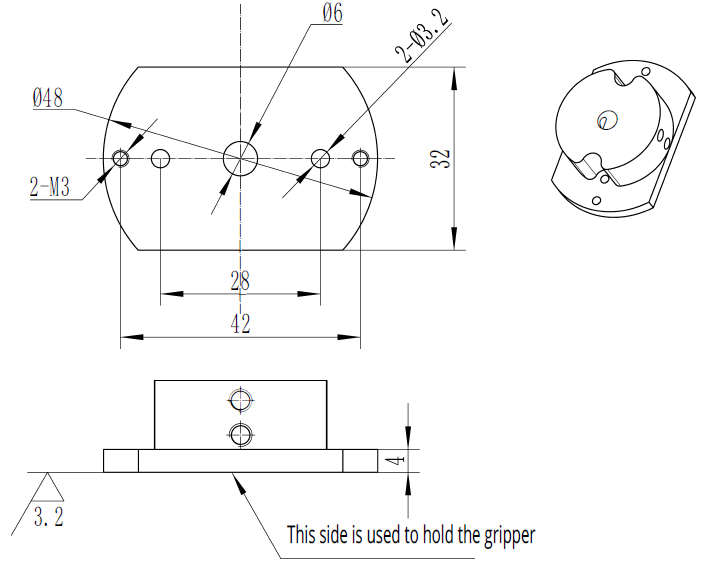
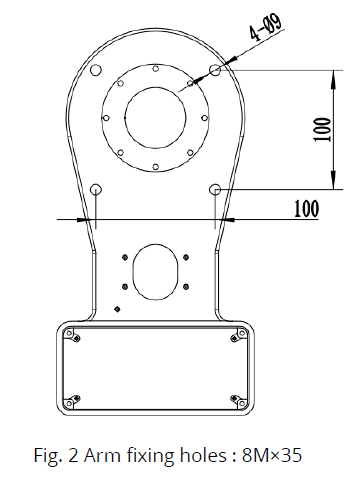
Installation dimensions
Arm fixing hole: Please fix the arm base before use to avoid the arm tipping over due to gravity.
Mounting flange for robotic arm gripper